МИКРОПРОЦЕССОРНЫЕ УСТРОЙСТВА В РАДИОЭЛЕКТРОННОЙ АППАРАТУРЕ
МИКРОПРОЦЕССОРЫ — ЭЛЕМЕНТНАЯ БАЗА ЦИФРОВЫХ УСТРОЙСТВ
1.1. ПРИНЦИПЫ ПОСТРОЕНИЯ МИКРОПРОЦЕССОРНЫХ СРЕДСТВ
Микропроцессорные средства (МПС) возникли в результате развития технологии и вычислительной техники. По своей сути микропроцессор — это устройство, представляющее собой одну «ли несколько больших интегральных схем (БИС), выполняющих -функции процессора ЭВМ. Являясь частью вычислительных устройств, МПС используют и принципы их построения. Вместе с тем, существующий уровень развития полупроводниковой технологии вносит свои коррективы в эти принципы. Например, разрядность и сложность микропроцессорных (МП) БИС определяются максимальными размерами кристаллов, изготовление которых может обеспечить технология производства.
При построении современных МПС используют, в основном, «следующие принципы: микропрограммное управление, модульность построения, магистральный обмен информацией, наращиваемость вычислительной мощности.
Микропрограммное управление. Классическое вычислительное устройство состоит из арифметического устройства (АУ), устройства управления (УУ), запоминающего устройства (ЗУ) и устройства в во да-вывода (УВВ); АУ и УУ образуют процессор любой ЭВМ, т. е. ее управляющую и обрабатывающую части. УУ вырабатывает сигналы, под действием которых АУ выполняет все необходимые операции и действия. Существуют два метода построения УУ: с использованием комбинационных схем и микропрограммного ЗУ. В первом случае каждое входное воздействие »а УУ жестко связано с выходным и их изменения возможны только при изменении электрической схемы УУ. Поскольку входное воздействие — это команда МП, то использование такого метода жестко фиксирует его систему команд; при этом достигается максимальное быстродействие УУ. Микропроцессоры, использующие комбинационные УУ, называют МП с фиксированным набором команд. Примером такого МП является КР580ИК80.
В соответствии с микропрограммным принципом управления любая сложная операция делится на последовательность более простых действий.
Такое простое действие называется микрооперацией и выполняется за один такт работы АУ. Для задания очередности следования микроопераций вводятся специальные переменные, называемые логическими условиями. Совокупность микроопераций, выполняемых за один цикл (несколько тактов) работы устройства, называется микрокомандой (МК). Микрокоманда представляет собой двоичное я-разрядное слово, содержащее код операции (КОП), выполняемой АУ, а также коды адресов исходных данных и результата. Микрокоманда поступает на вход АУ, которое дешифрует ее и вырабатывает управляющие сигналы. Эти сигналы стробируются импульсами внутреннего блока синхронизации, который формирует временные такты выполнения микроопераций. Микрооперации жестко связаны со структурой АУ и не могут быть изменены.
После выполнения действия, определенного КОП, АУ информирует об окончании выполнения микрокоманды. Каждому АУ присущ только свой, конкретный набор МК, который называется системой микрокоманд.
Устройство, предназначенное для записи, хранения и считывания МК называется микропрограммным устройством управления (МУУ). В простейшем случае МУУ представляет собой БИС ПЗУ «ли ППЗУ, в которой записаны МК- Для считывания этих МК необходимо устройство формирования адреса, например счетчик. Любую операцию можно представить последовательностью МК (микропрограммой). Необходимо отметить два основных отличия микропрограммного управления от жесткого: смена выполняемой операции обеспечивается заменой микропрограммы; при считывании каждой МК требуется обращение к ПЗУ, что снижает быстродействие УУ. Итак, микропрограммное управление заменяет аппаратные средства программными и обеспечивает высокую гибкость, но при снижении быстродействия.
Минрокомандный уровень управления АУ является самым низким уровнем, доступным разработчику МПУ. Микрокоманда наиболее полно отражает структуру АУ, в силу чего реализация операций с помощью микропрограмм является оптимальной в смысле экономии памяти и повышения быстродействия.
Наряду с этим МК представляет собой достаточно мелкую детализацию выполняемой операции, например «обнулить регистр», «содержимое регистра переслать в аккумулятор» и т. д. Поэтому для программирования сложных алгоритмов, которыми являются алгоритмы обработки сигналов, потребовалось бы составить микропрограммы,, содержащие сотни, тысячи микрокоманд. Отладить такую микропрограмму очень сложно.
Для повышения уровня детализации выполняемой операции вводится командный уровень управления. Символом этого уровня является команда, которая представляет собой (как и микрокоманда) m-разрядное двоичное слово (обычно m<n). В общем случае формат команды должен включать КОП, адреса операндов, над которыми выполняется операция, и адрес результата. Команда представляет собой последовательность МК (микропрограмму). С целью экономии емкости микропрограммной памяти запись МК осуществляется в ячейки памяти, содержание которых, учитывает код текущей МК [1].
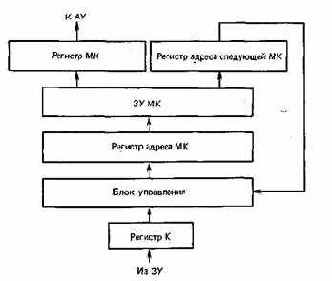
Рис. 1.1. Структурная схема микропрограммного устройства управления
Структурная схема МУУ изображена на рис. 1.1. Команда, считанная из ЗУ, поступает на .регистр команд и далее на блок управления. В соответствии с принятыми сигналами блок управления формирует адрес первой МК микропрограммы, соответствующей принятой команде. Этот адрес через регистр поступает в ЗУ МК. Считанная из ЗУ МК состоит из двух частей: операционной (или собственно микрокоманды, которая поступает на АУ) и адресной, которая поступает на блок управления. Приняв адресную часть МК, блок управления формирует адрес следующей МК. Виовь считанная МК имеет свою адресную часть, которая поступает на блок управления. Этот процесс продолжается до тех пор, пока не будет считана последняя МК данной программы. После этого МУУ готово к приему следующей команды. Длина микропрограммы определяется разрядностью кода адреса следующей МК. В табл. 1.1 приведены типовые команды процессора, выполненного на микросхемах серии К589, и число МК, содержащихся в этих командах [4, 6].
Доля МК обращения к ЗУ составляет 20 — 40%, это дает возможность работать нескольким МП с общей памятью без взаимных помех.
Итак, использование микропрограммного управления при построении МПУ обработки сигналов позволяет разрабатывать системы команд и языки, ориентированные на структуру реализуемых алгоритмов, повышать быстродействие за счет параллельной работы нескольких микропроцессоров с общей памятью.